Rob - Fab : Steam Bent Timber



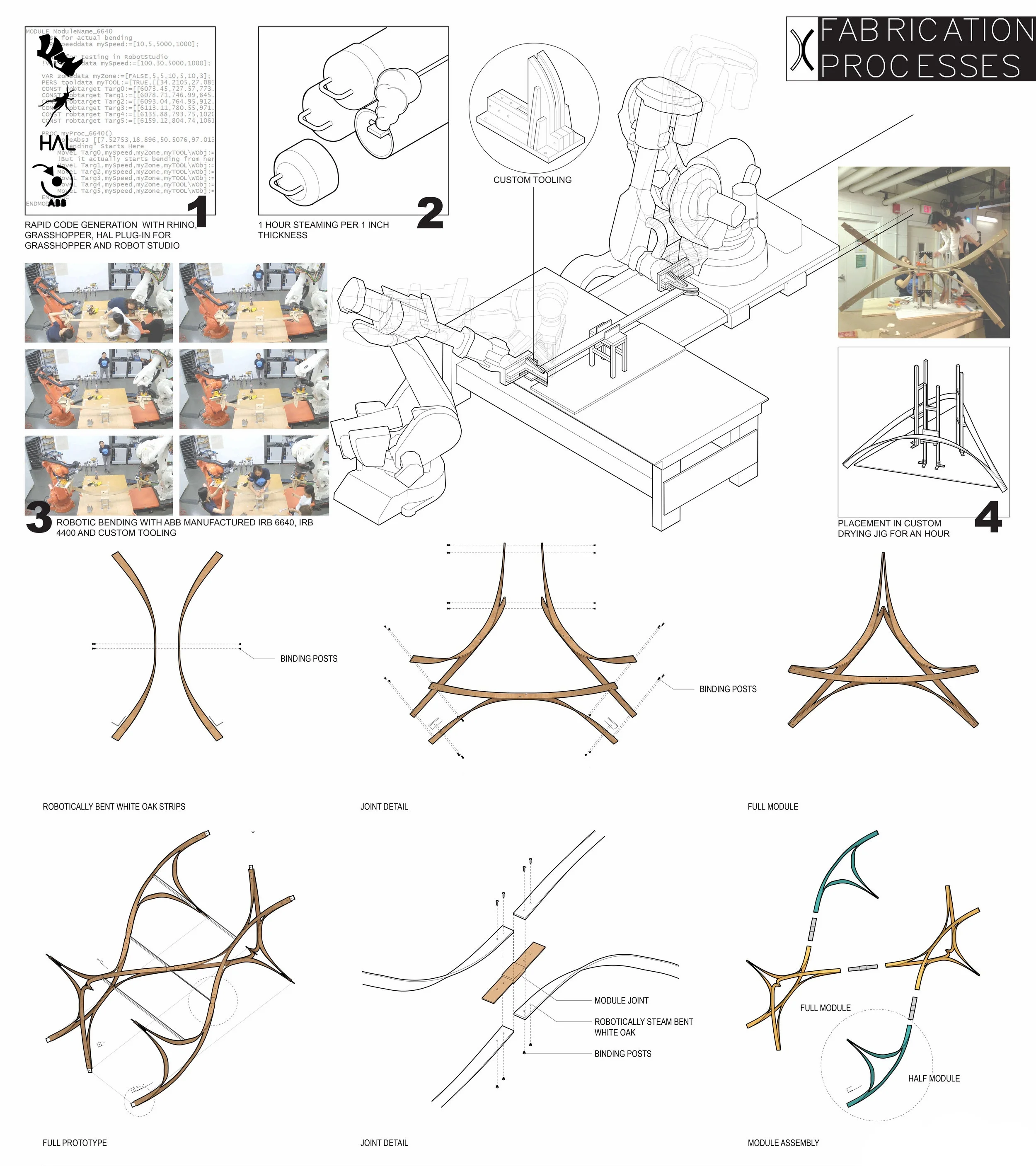
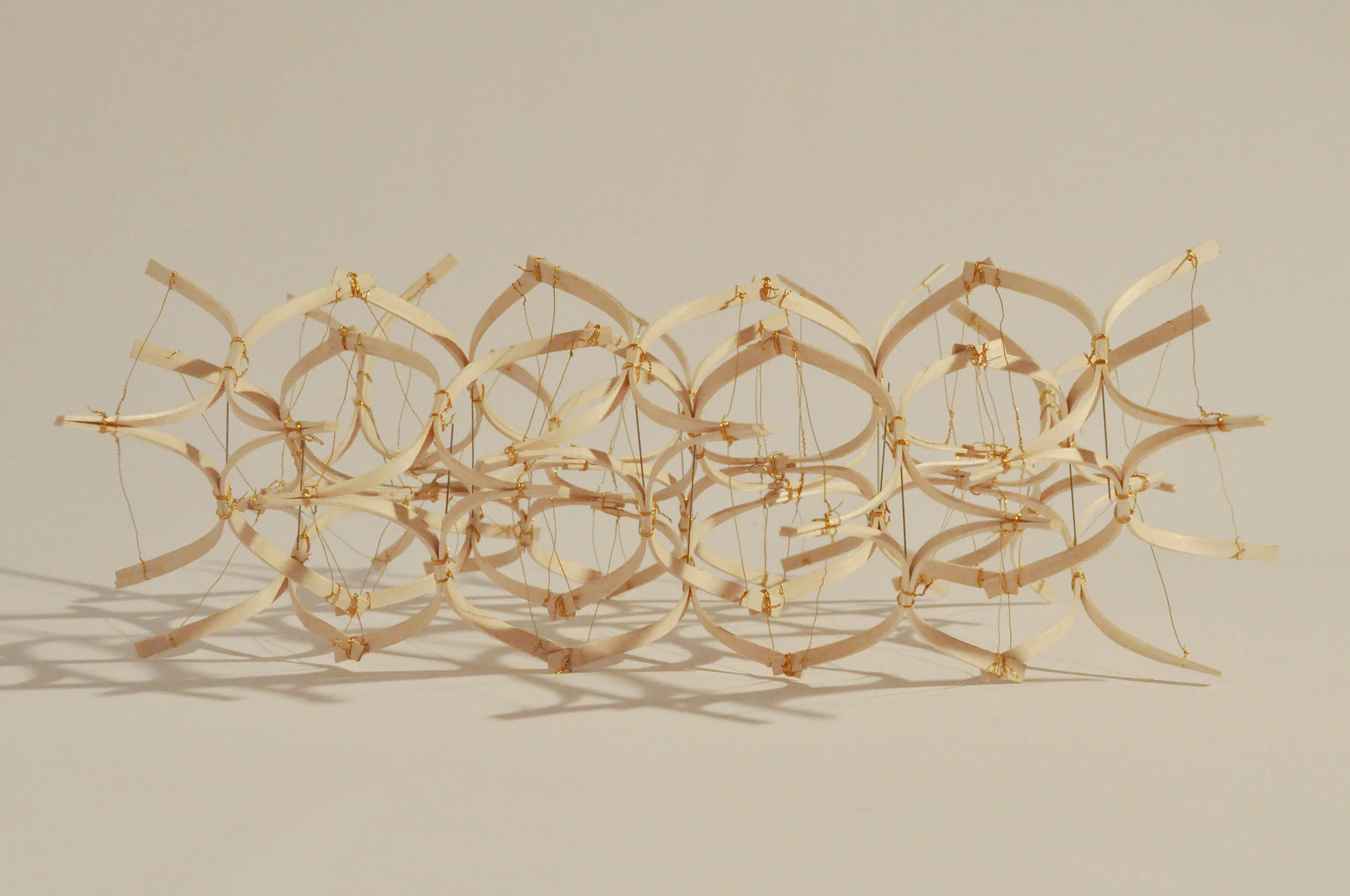
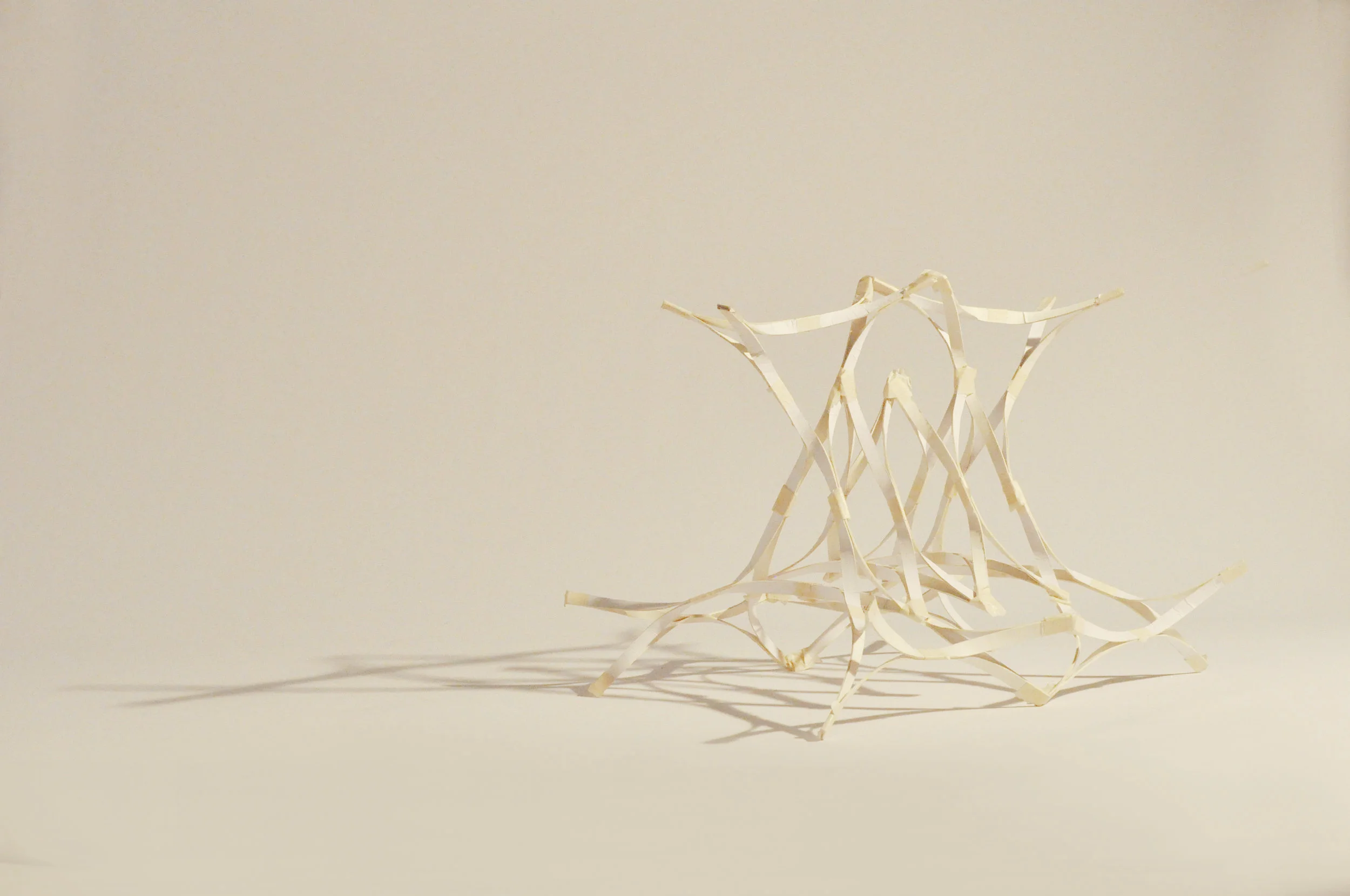
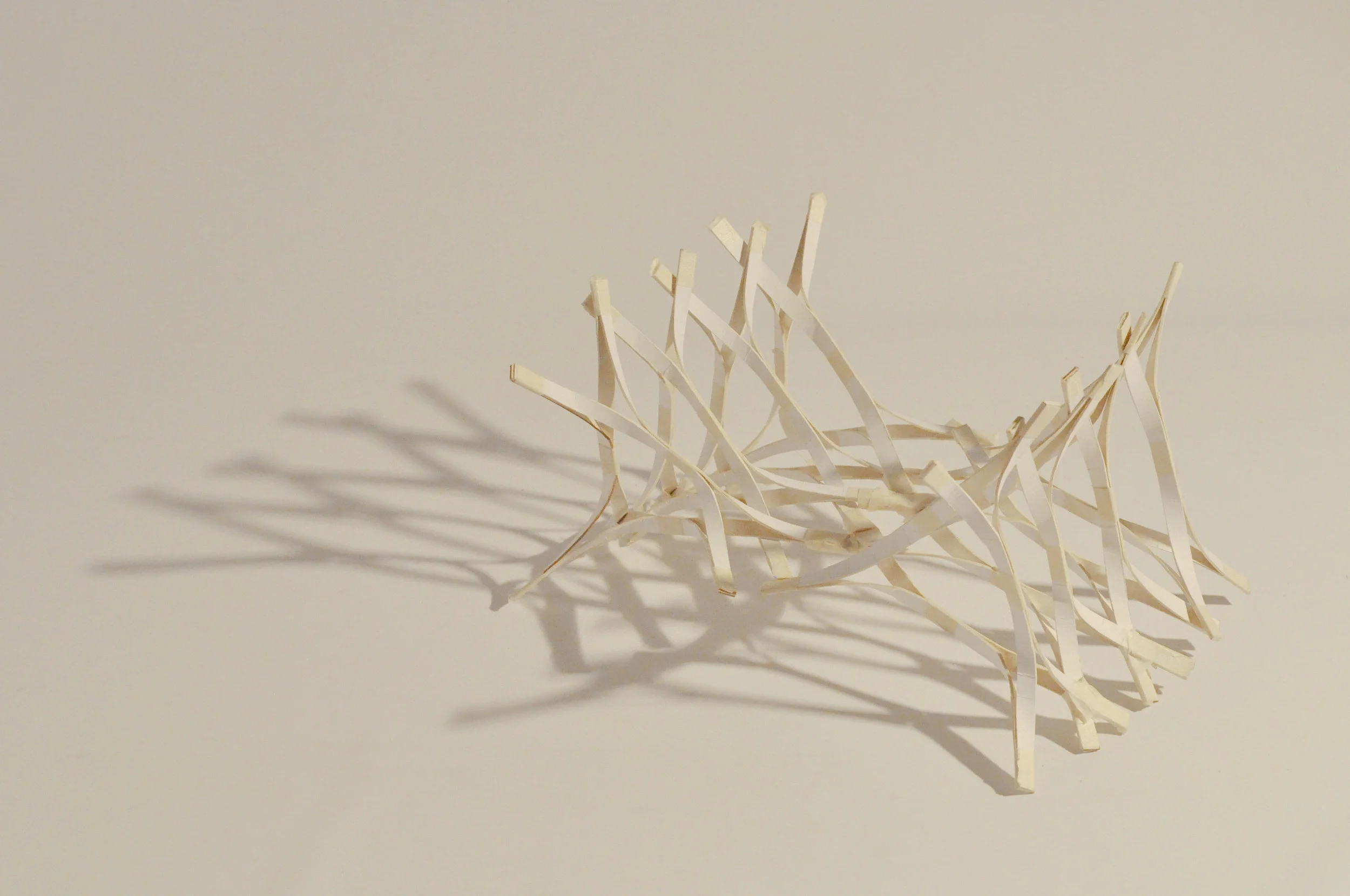
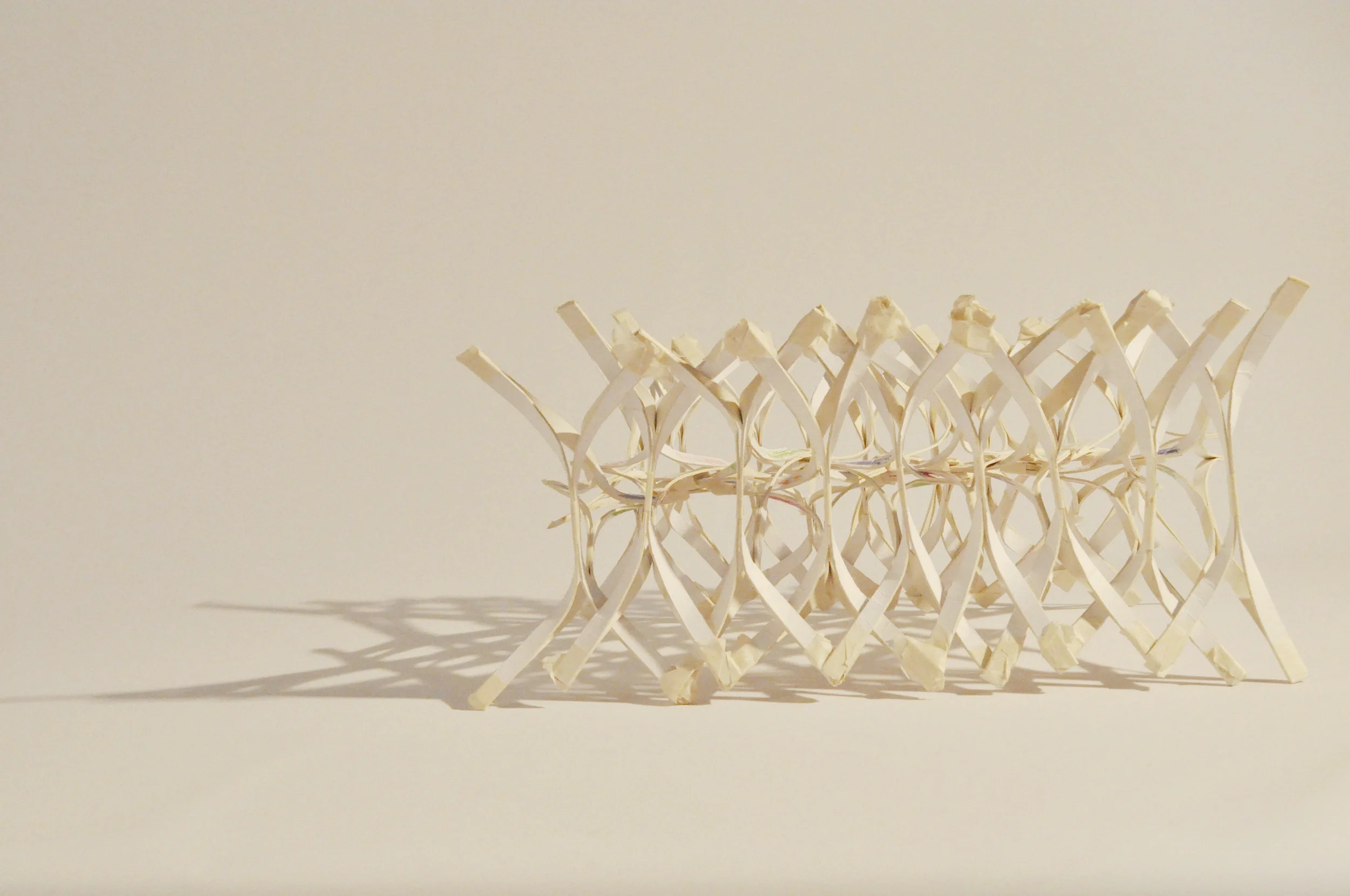
Fabrication of computationally generated forms typically employ compliant materials such as plastics while avoiding inconsistent types of materials such as timber. This studio project explored the possibilities of pairing industrial robots with steam bending wood, which is traditionally a manual process. The robotic arm, which is programmed to bend the steamed wood into specific and complex positions, replaces the need for jigs that are labor and material intensive to build. Another advantage is that the robot, with slight modifications to the code, can bend the wood differently for every piece, making it a much more efficient process over having to build a unique jig for every type.
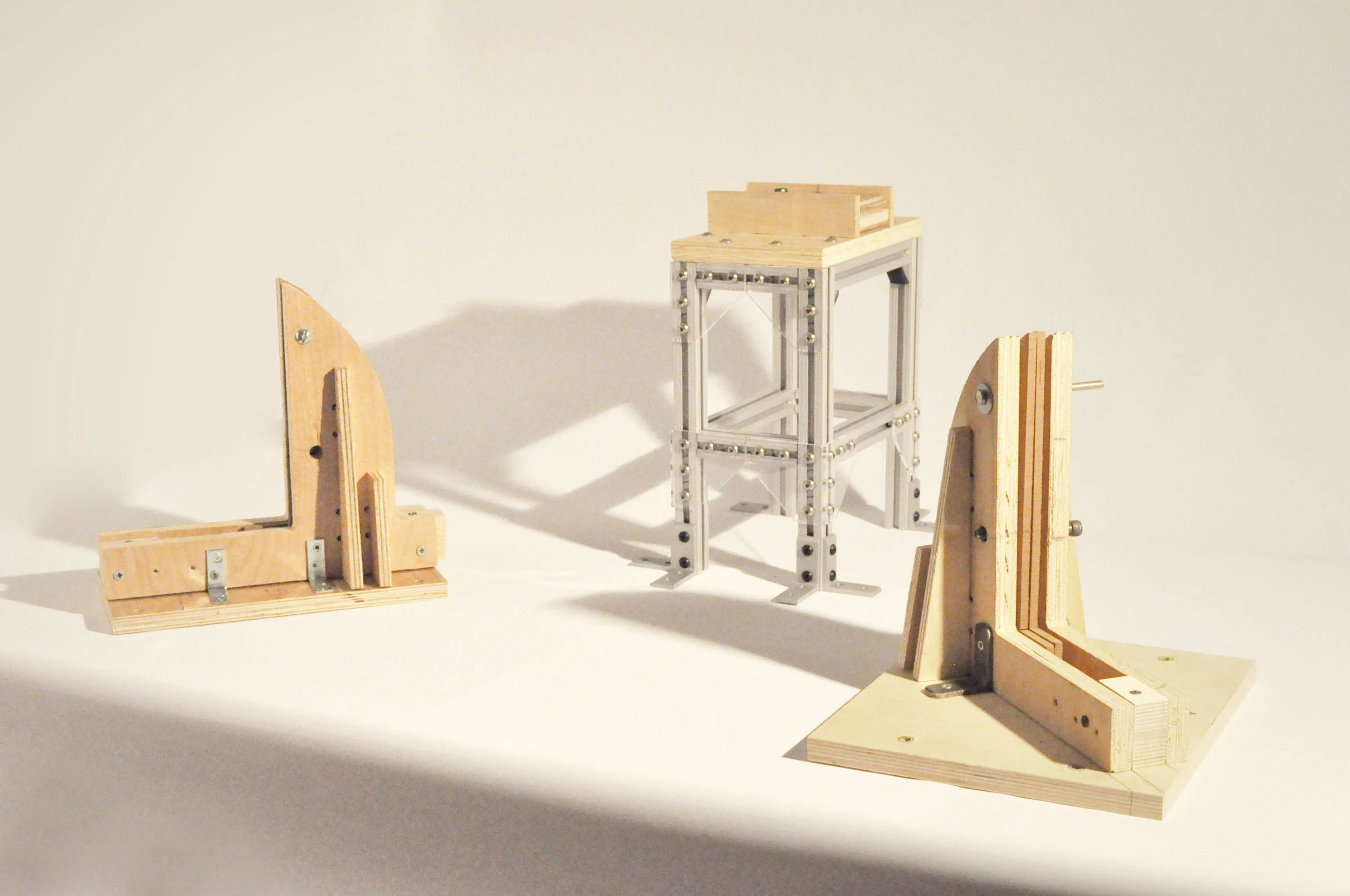
For this process, custom End of Arm Tools (EoAT) were designed and fabricated. These allowed the robots to securely hold onto the planks while allowing rotational freedom for the wood to readjust as it is being bent. To create the intended form, both ends of the plank were bent upwards simultaneously while the robots induced a twisting motion.



in collaboration with
Shannon Earnest, Kendra Ho + Ara Lee
advisers
Prof. Joshua Bard
Michael Jeffers
