Rob-Fab: Metal Forming
By employing parametric work flows and versatile digital tools, exploration in customization can be more expansive and efficient.

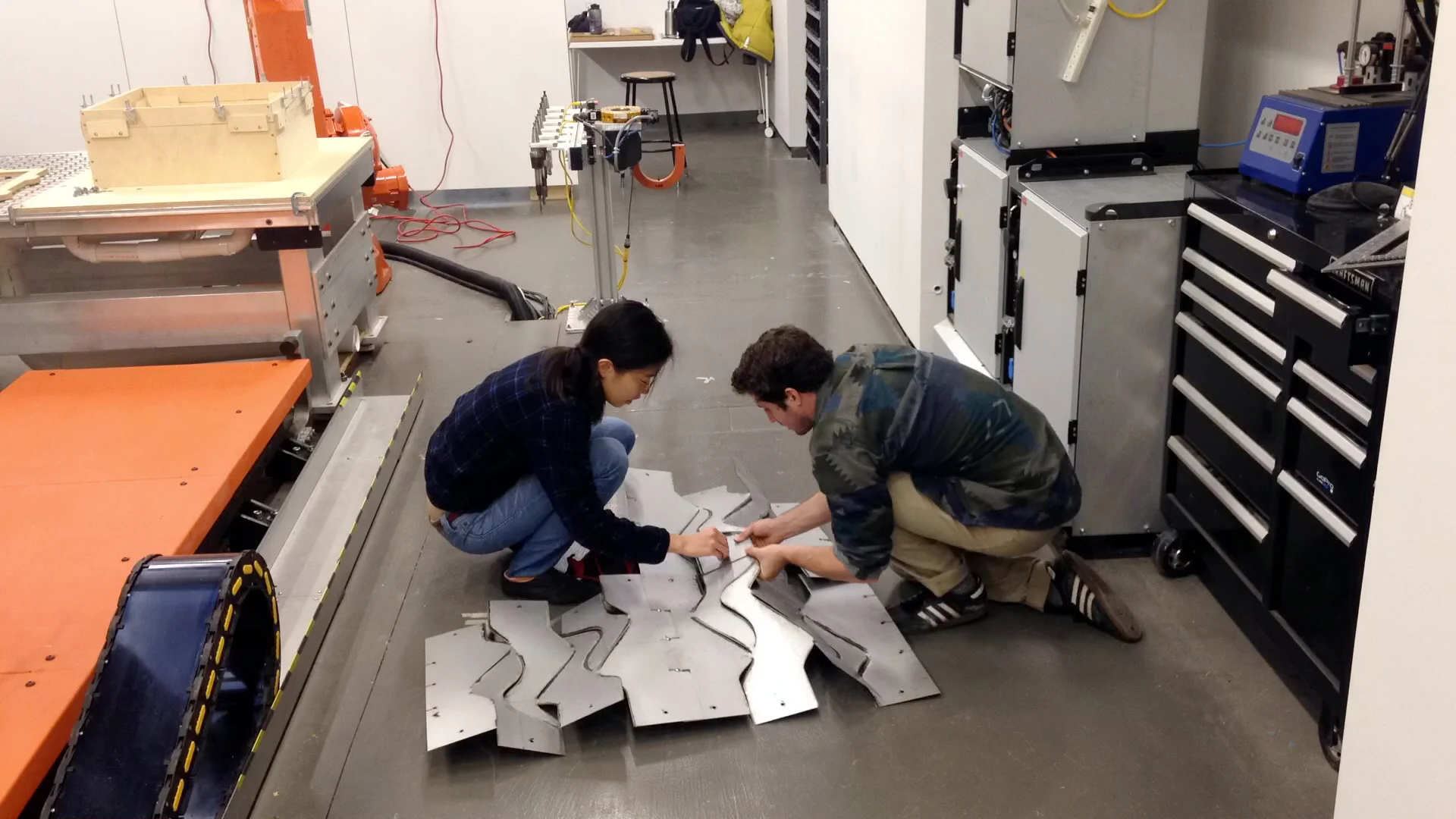
final assembly of six 0.032” gague 2’x2’ steel sheets
This was a semester long research seminar that explored metal deformation techniques with the use of an industrial robot arm. Current design practices demand for more customized parts; however, delivering these parts is highly time consuming and labor intensive without the use of a versatile digital tool. By employing parametric work flows and a versatile digital tool, exploration in customization can be more expansive and efficient.
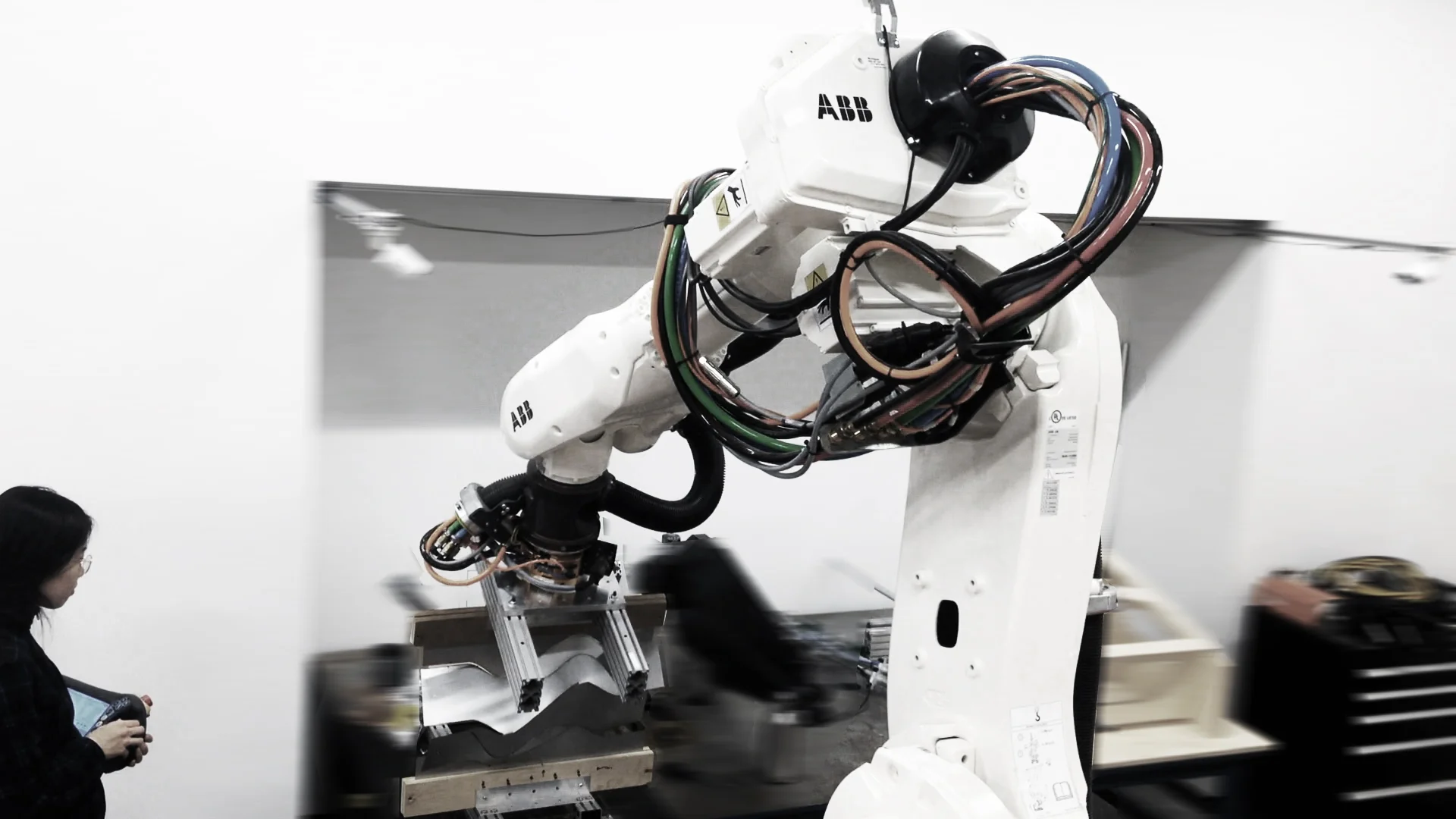
The research focused on the multi-directional bending of metal sheets, aluminum and steel, based on its cut geometry and the robot movement. We were compelled by the multi-faceted deformed surface that flat sheet material could transform into. To explore this effect, we cycled through numerous cut pattern geometries to understand how aluminum and steel sheets could be biased for controlled deformation. Simultaneously, we developed the optimal robot movement to direct the material into the intended form, without any jigs other than the two edge grippers. The final cut geometry allowed for doubly curved surfaces that can seamlessly transition into the next panel while the robot’s movement biased the direction and the degree of the folds.
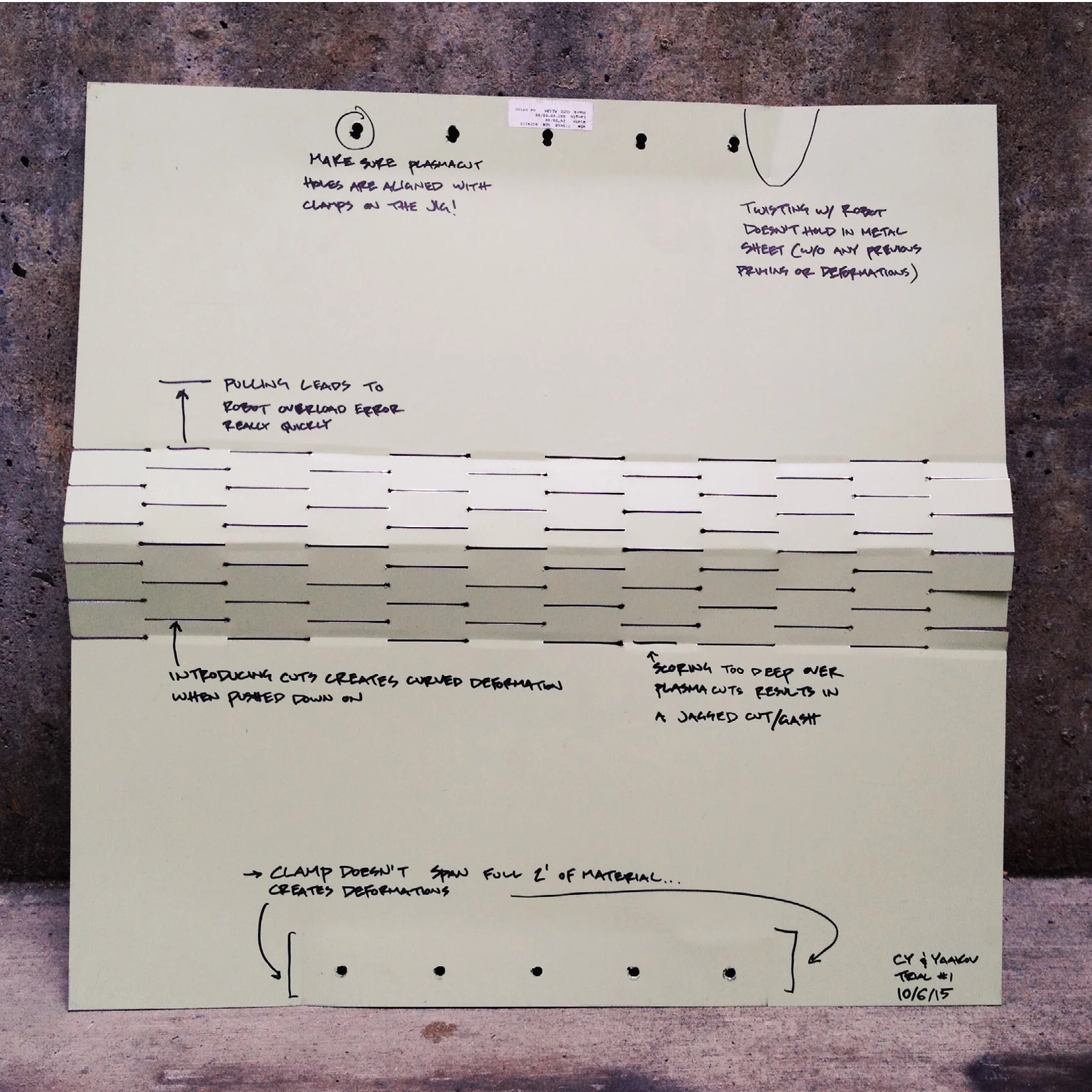
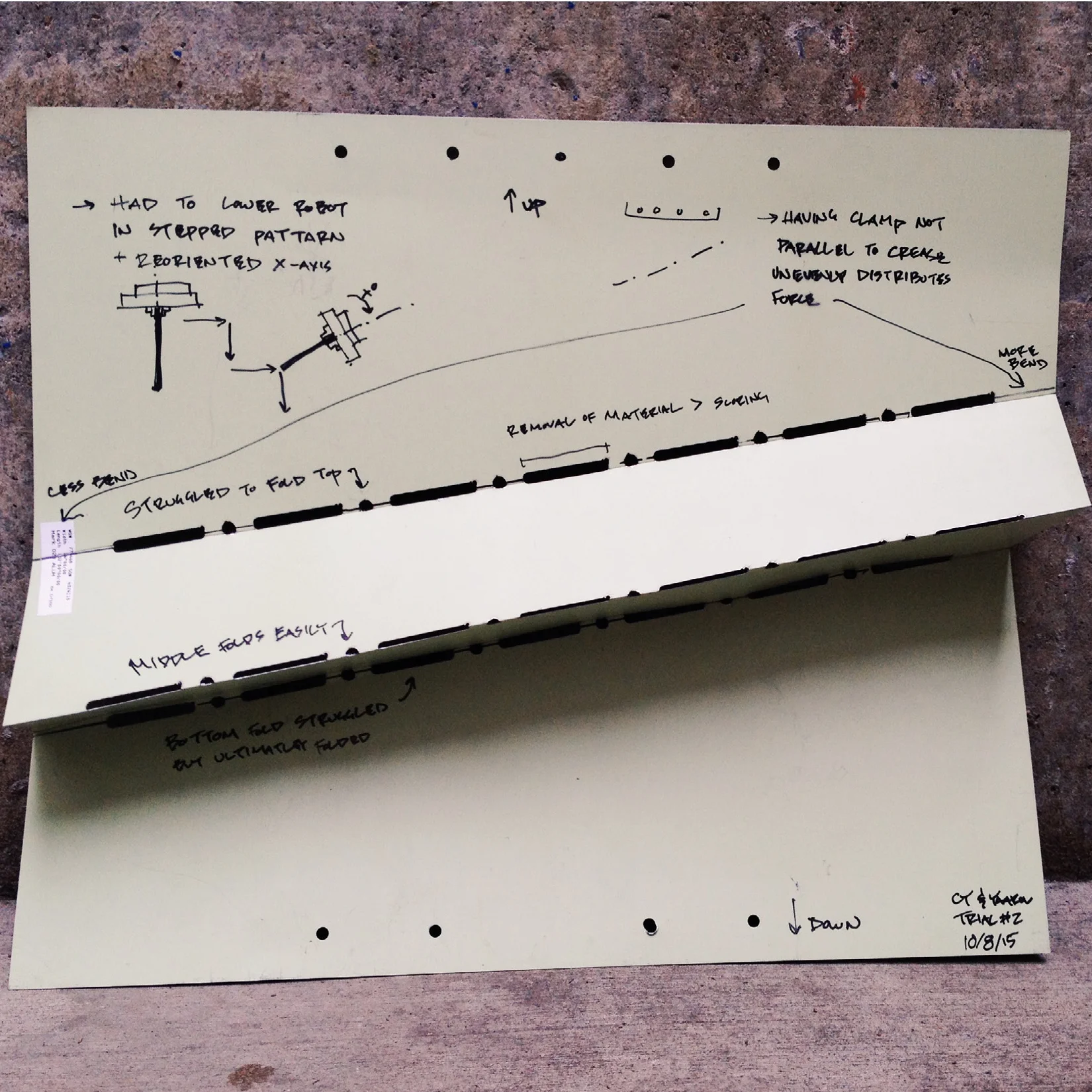
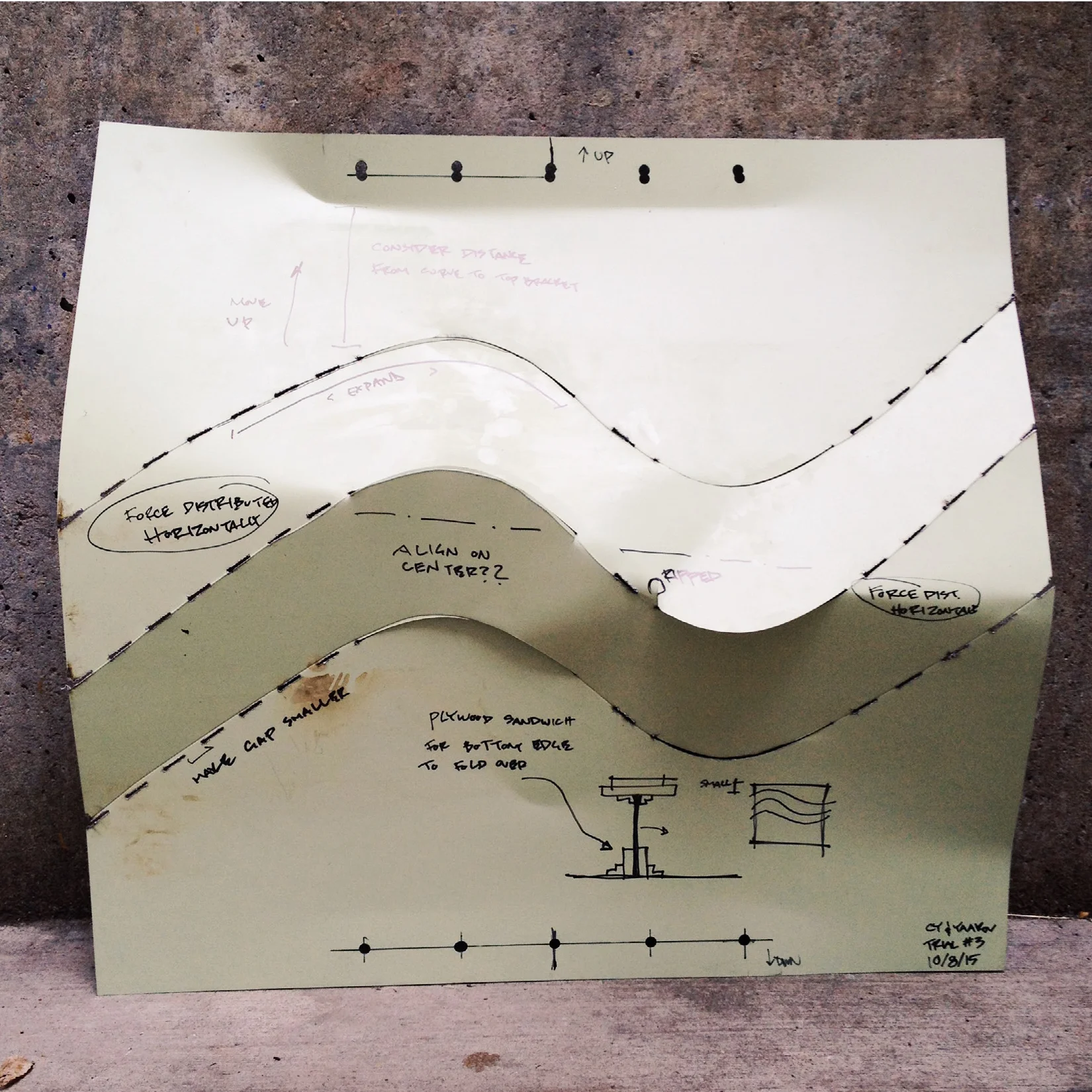
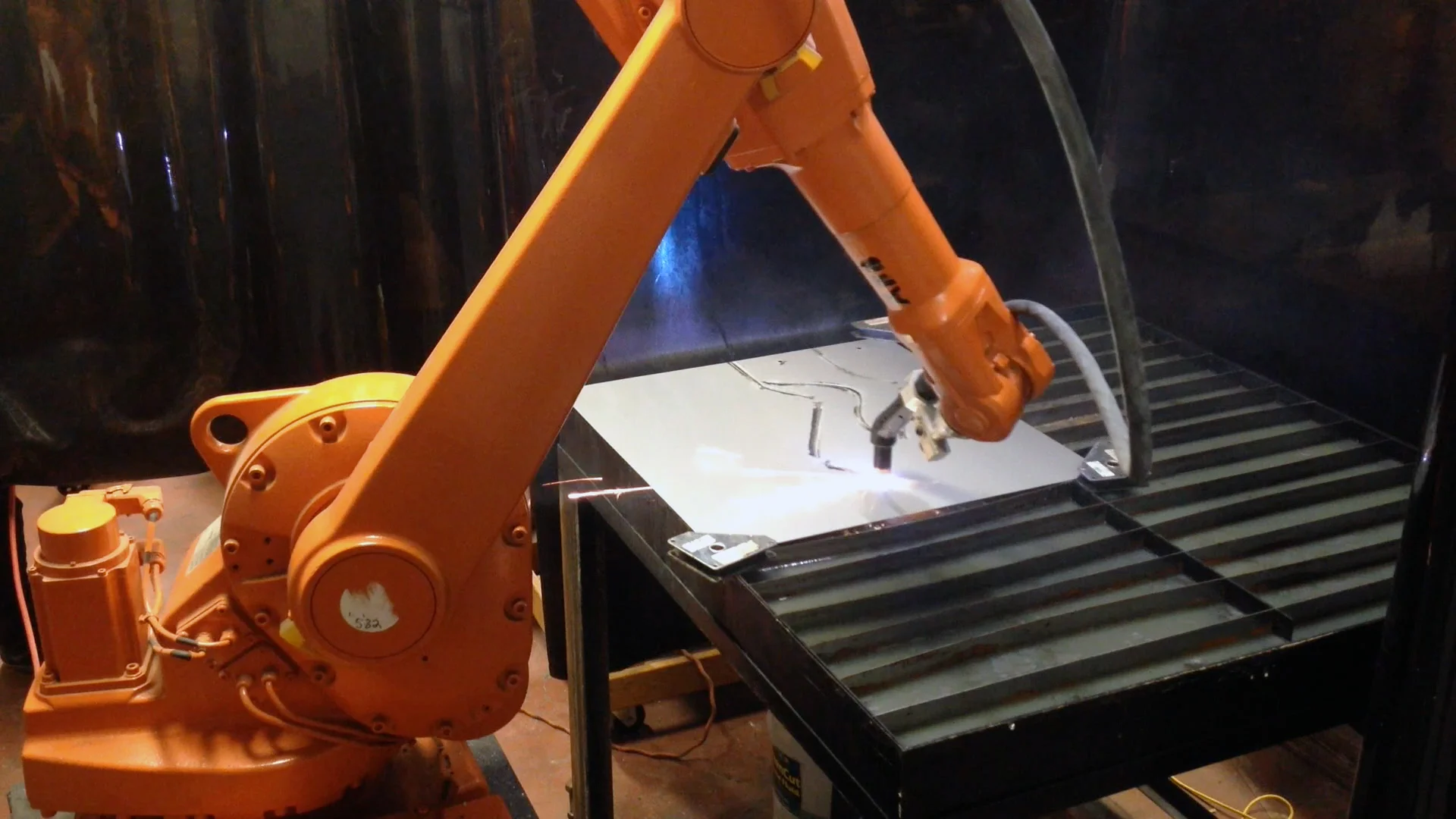
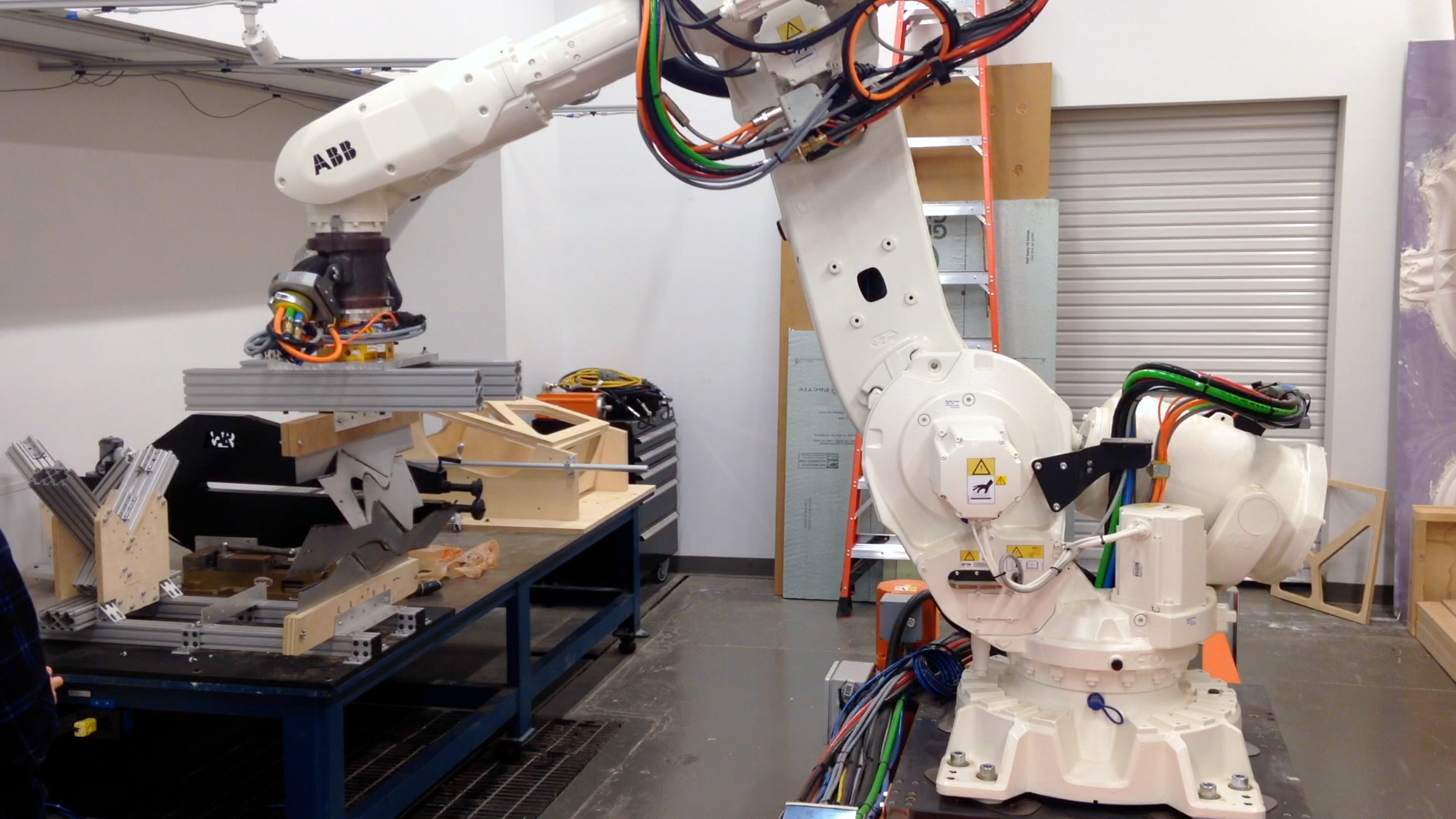
early testing phase: iterating through different cut patterns and robotic motions
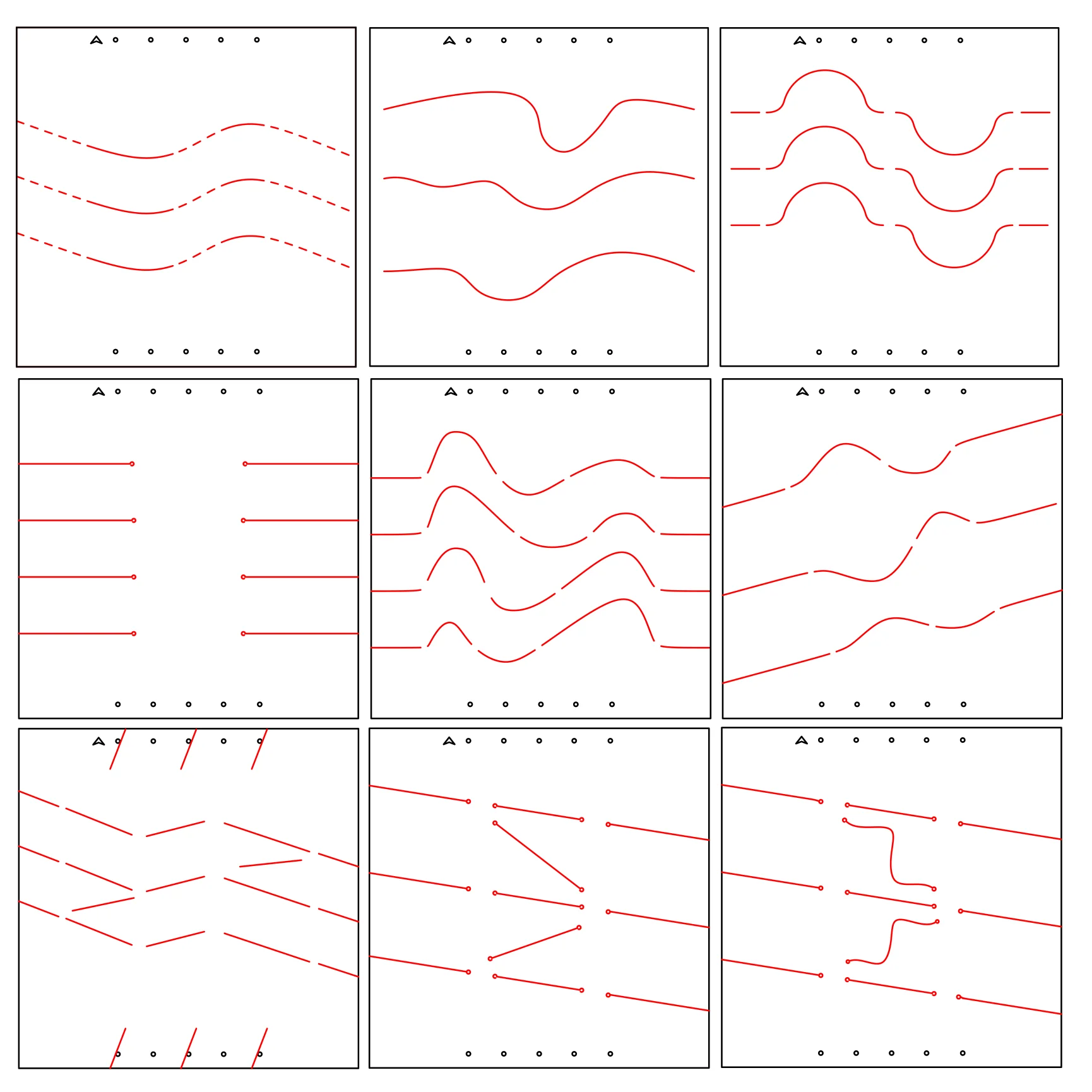
matrix of every cut pattern tested.
type/row 1: sinusoidal. type/row 2: edge cuts. type/row 3: hybrid
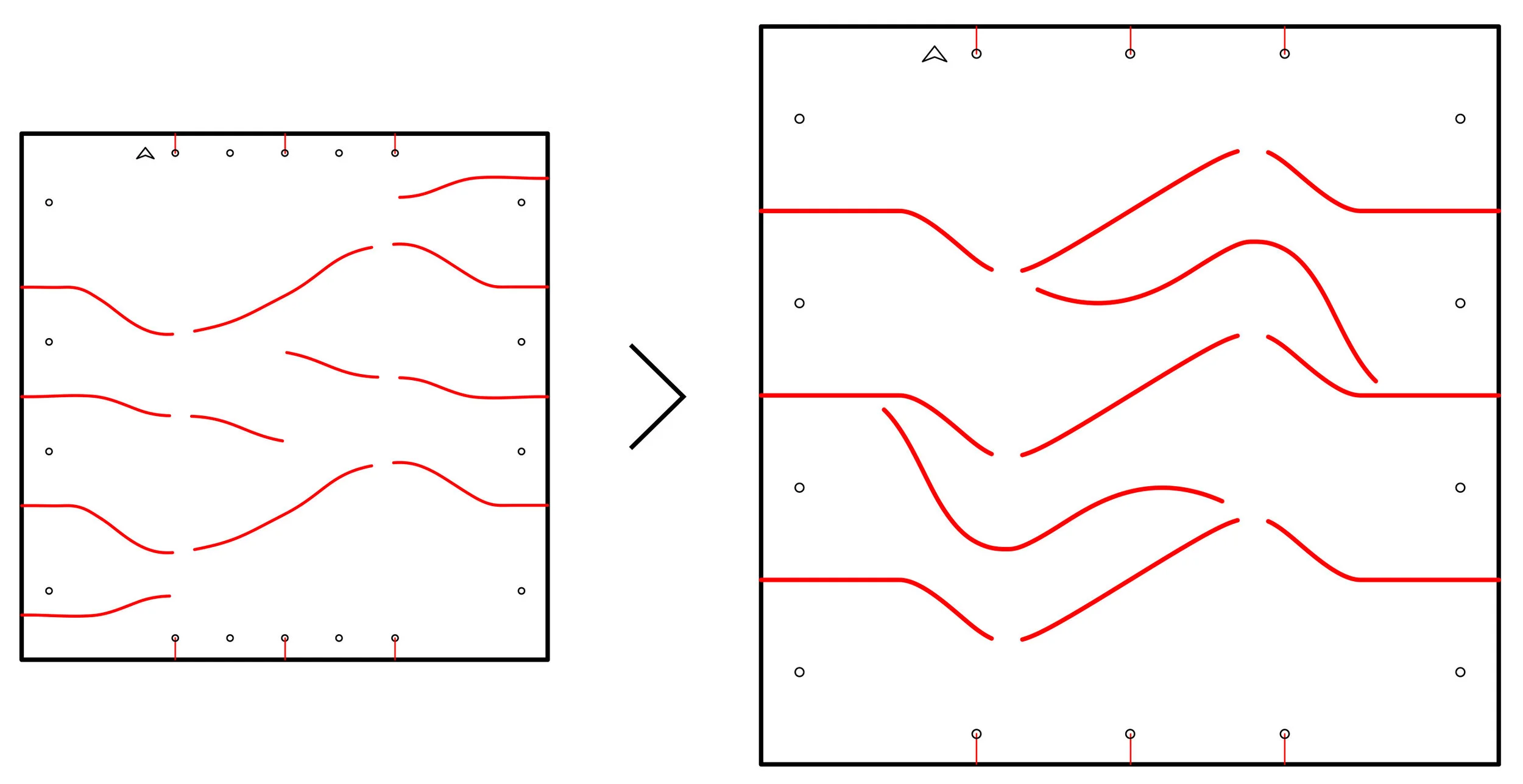
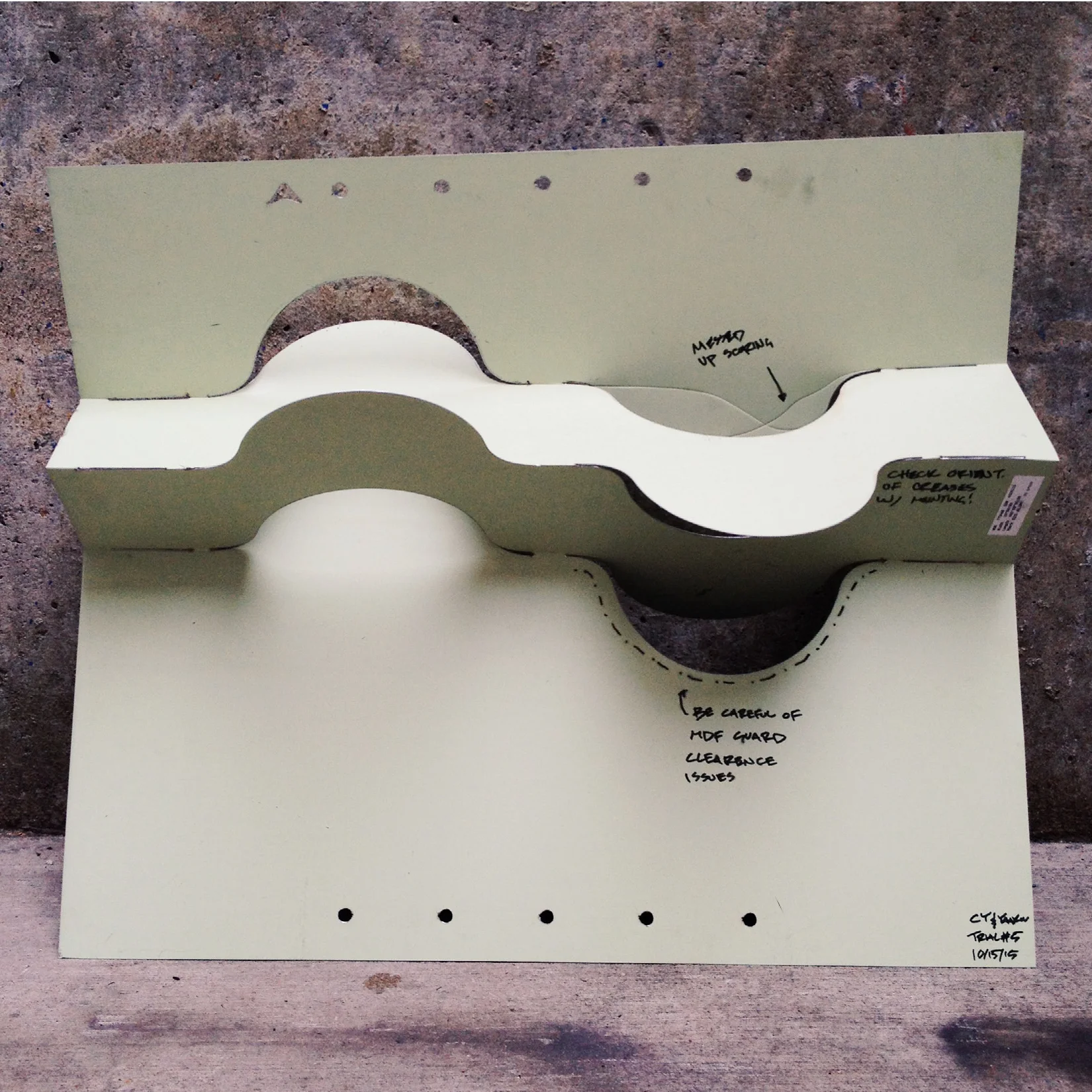
final optimized pattern which incorporates the 3 types into 1
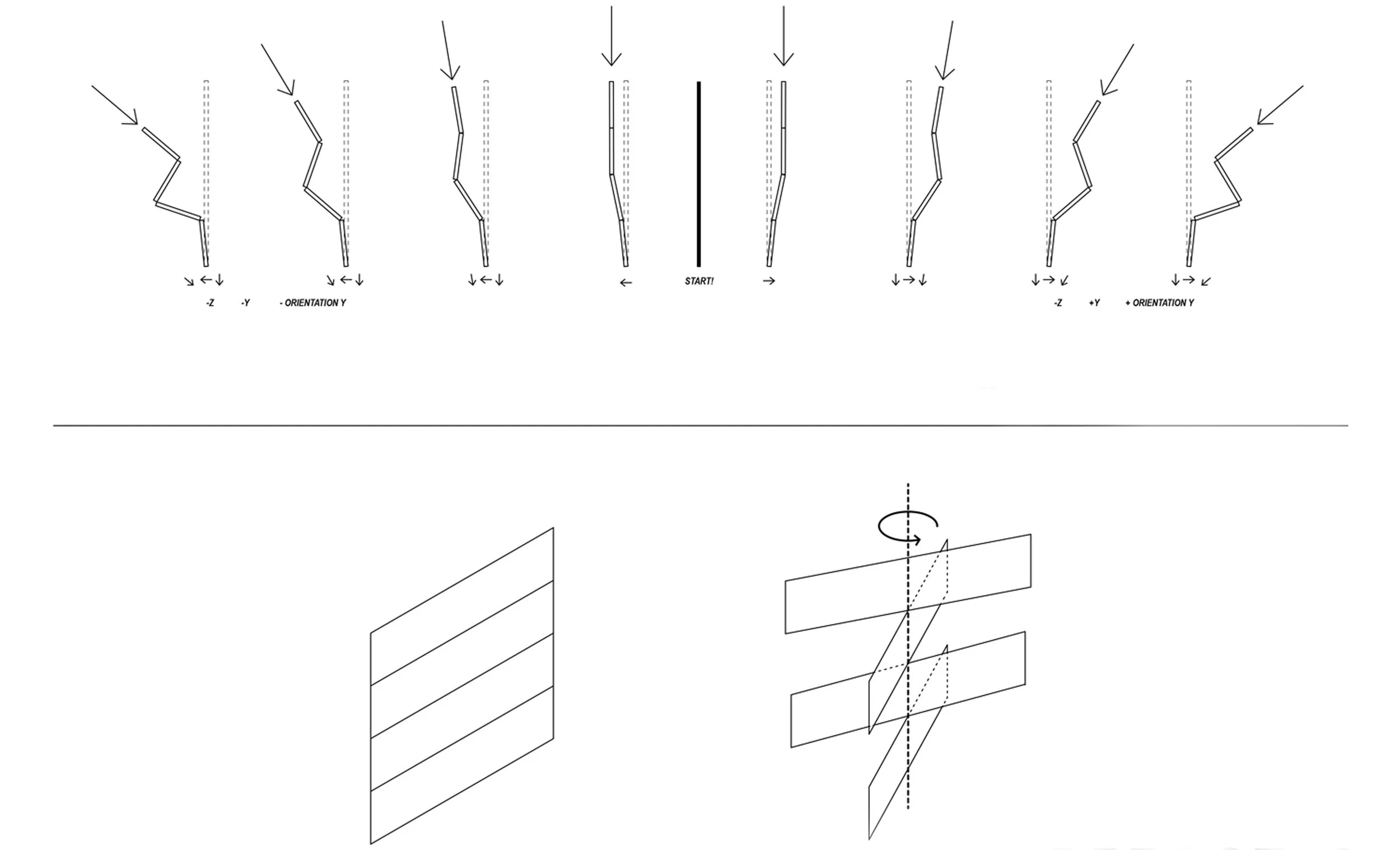
2 robotic motions (push and twist) that bias the deformation.
in collaboration with
Yaakov Lyubetsky
adviser
Prof. Jeremy Ficca